在这个选修部分中,我们将研究如何我们将对用于近似策略梯度的目标函数进行微分。
让我们首先回顾一下我们的不同公式:
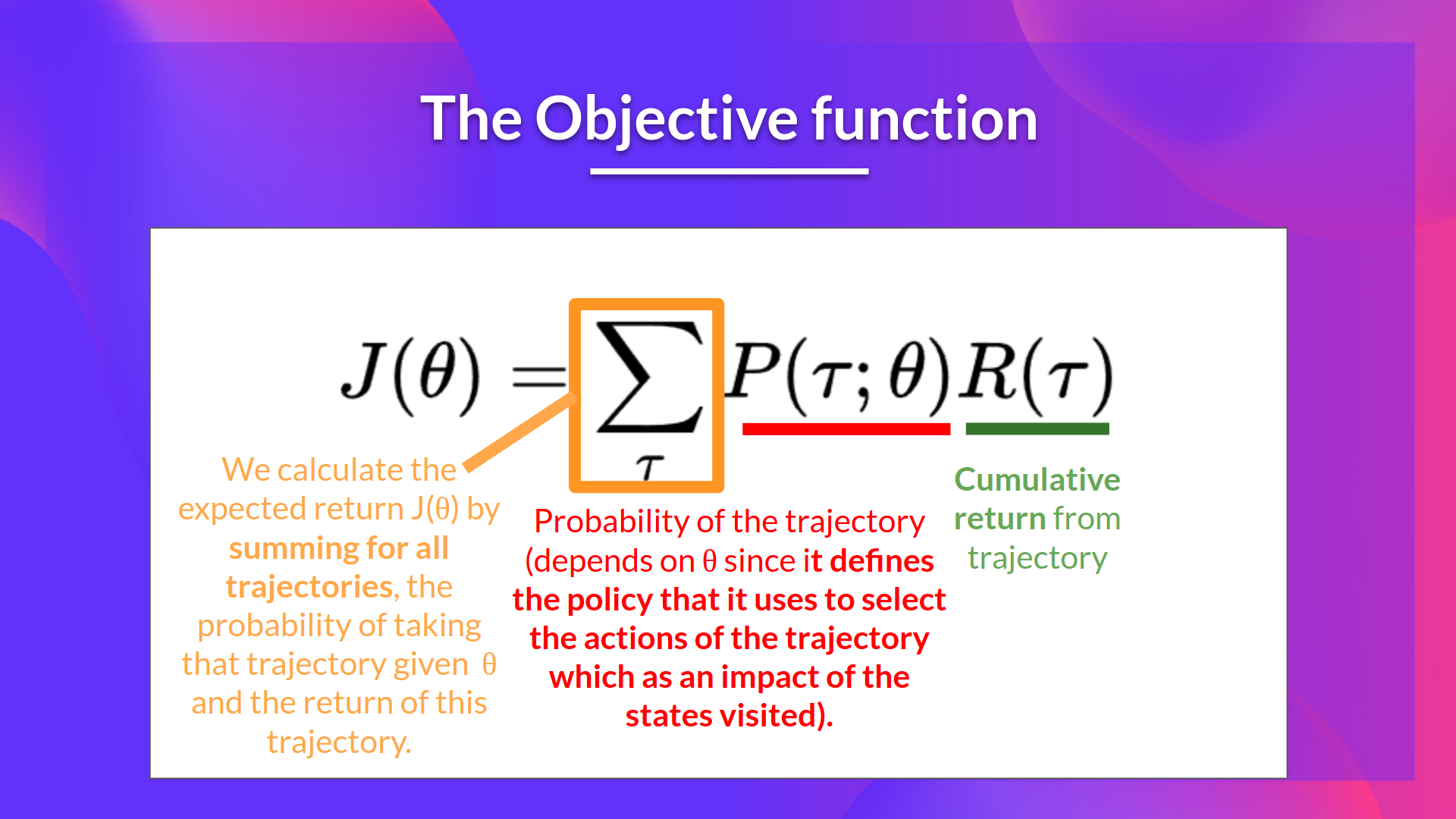
- 目标函数
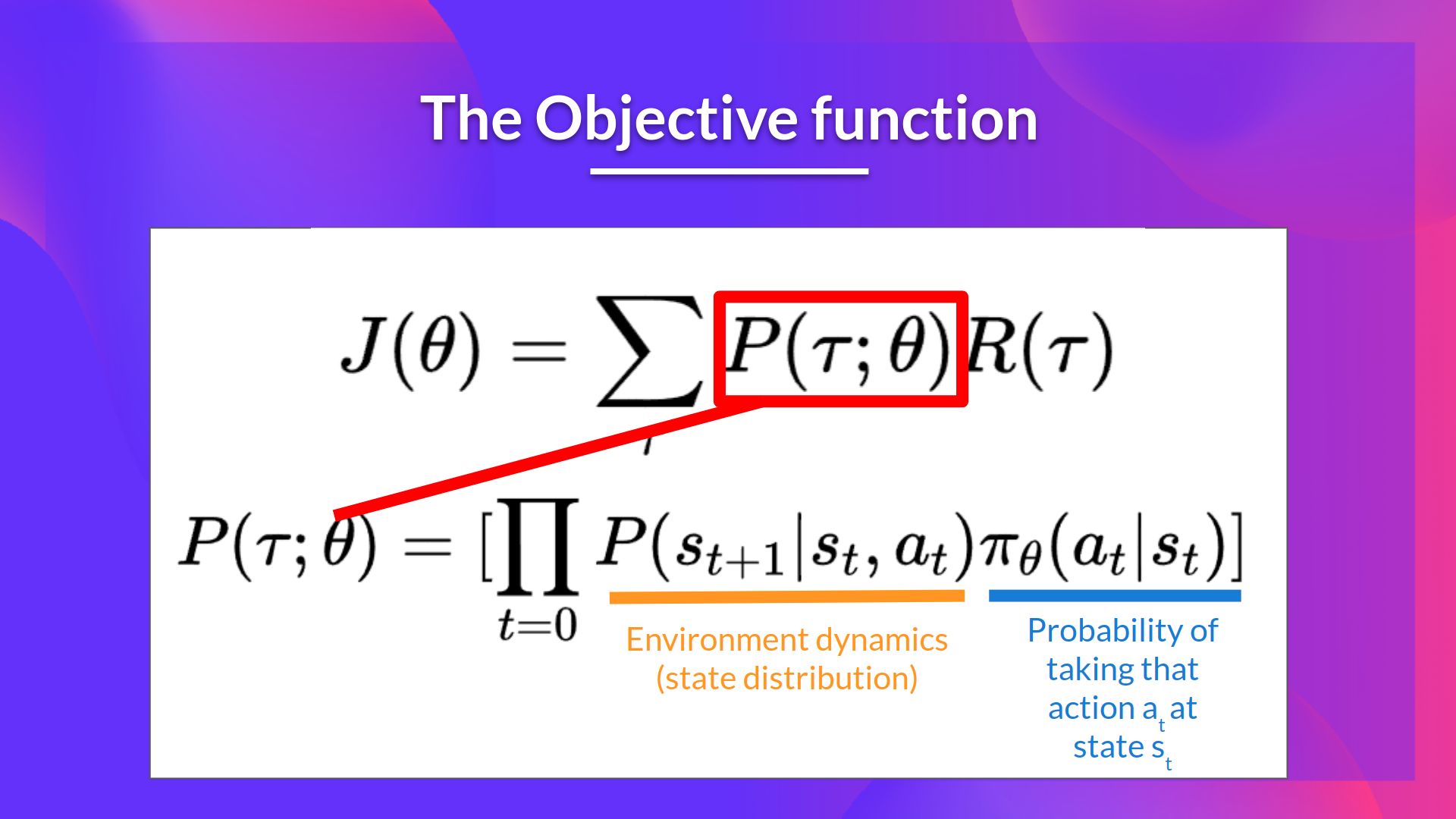
- 轨迹的概率(给定来自 \(\pi_\theta\) 的动作):
所以我们有:
我们可以将求和的梯度重写为梯度求和:
接着我们可以运用“对数求导技巧”(也称“似然比技巧”或“REINFORCE技巧”),
这是微积分中的一个简单规则,它意味着 $$\( \nabla_x log f(x) = \frac{\nabla_x f(x)}{f(x)} \)
因此,这就是我们的似然策略梯度:
感谢这个新公式,我们可以使用轨迹样本来估计梯度(如果你愿意,我们可以使用基于样本的估计来近似似然比策略梯度)
但是我们还有一些数学工作要做:我们需要简化 \( \nabla_\theta log P(\tau|\theta) \)
我们知道:
我们知道一个对数的乘积等于两个对数之和:
我们也知道和的梯度等于梯度的和:
由于 MDP 的初始状态分布或状态转换动力学都不依赖于 \(\theta\) ,两项的导数都是 0。因此我们可以移除它们:
因此:
我们可以将求和的梯度重写为梯度求和: