4.3_策略梯度理论的优缺点
关于这点,你或许会问,“深度 Q-learning 已经棒极了!为什么还使用策略梯度理论?”。为了回答这个问题,让我们先学习一下策略梯度理论的优缺点。
优点
与基于价值的方法相比,它有很多优点。让我们看看其中的一些:
集成的简单性
我们可以直接估计策略而不存储额外的数据(动作值)。
策略梯度方法可以学习随机策略
策略梯度方法可以学习随机策略,而价值函数则不能。
这导致两个后果:
- 我们不需要手动实现探索/利用权衡。由于我们输出动作的概率分布,因此智能体会探索状态空间而不总是采用相同的轨迹。
- 我们也摆脱了感知混淆的问题。感知混淆是指两个状态看起来(或确实)相同但需要不同的动作。
让我们看一个例子:我们有一个智能真空吸尘器,它的目标是吸走灰尘,避免杀死仓鼠。
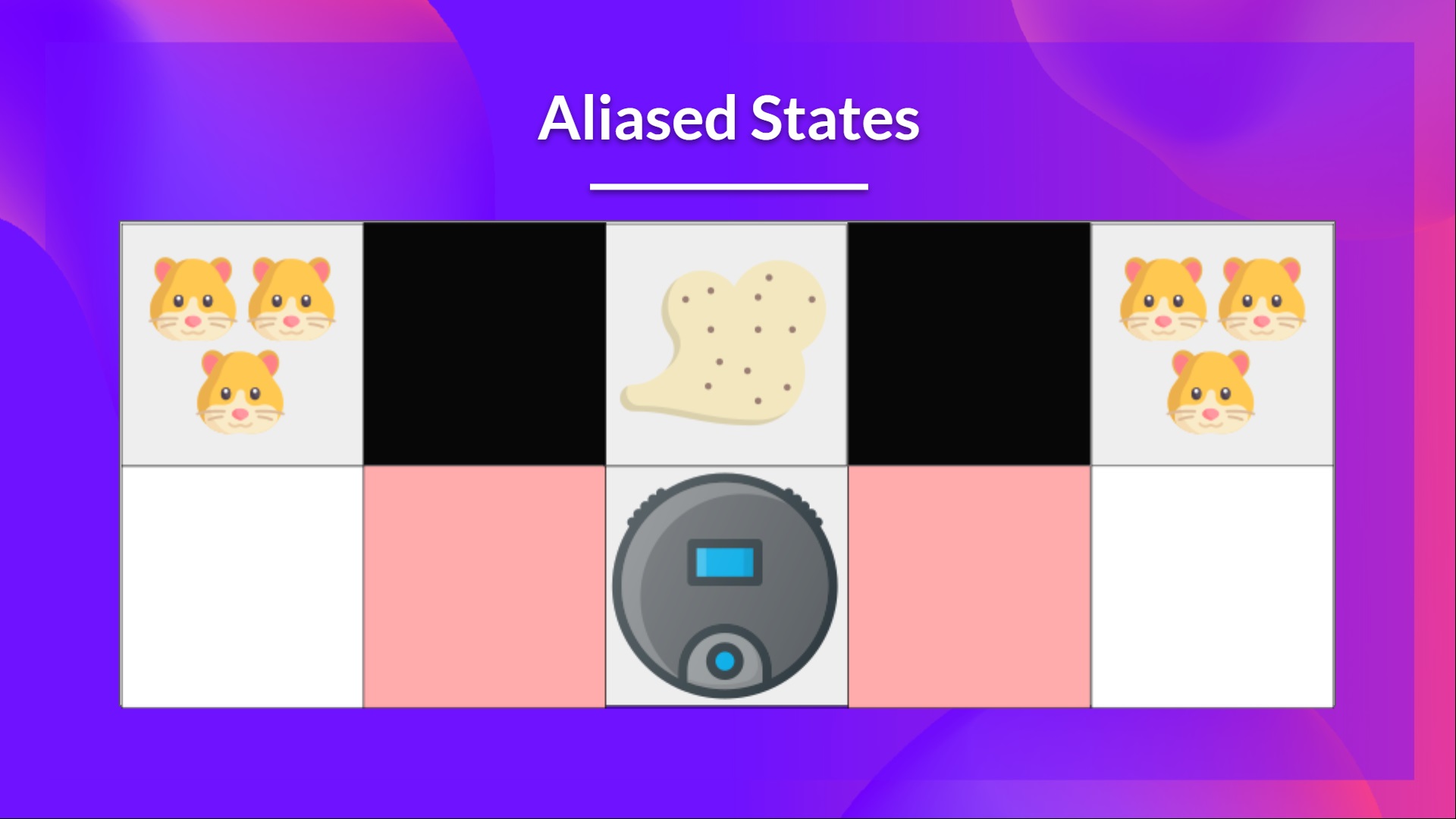
我们的真空吸尘器只能感知墙壁的位置。
问题在于,这两个位置的情况是具有感知混淆的状态,因为智能体对于每一个位置都感知到了上墙和下墙。
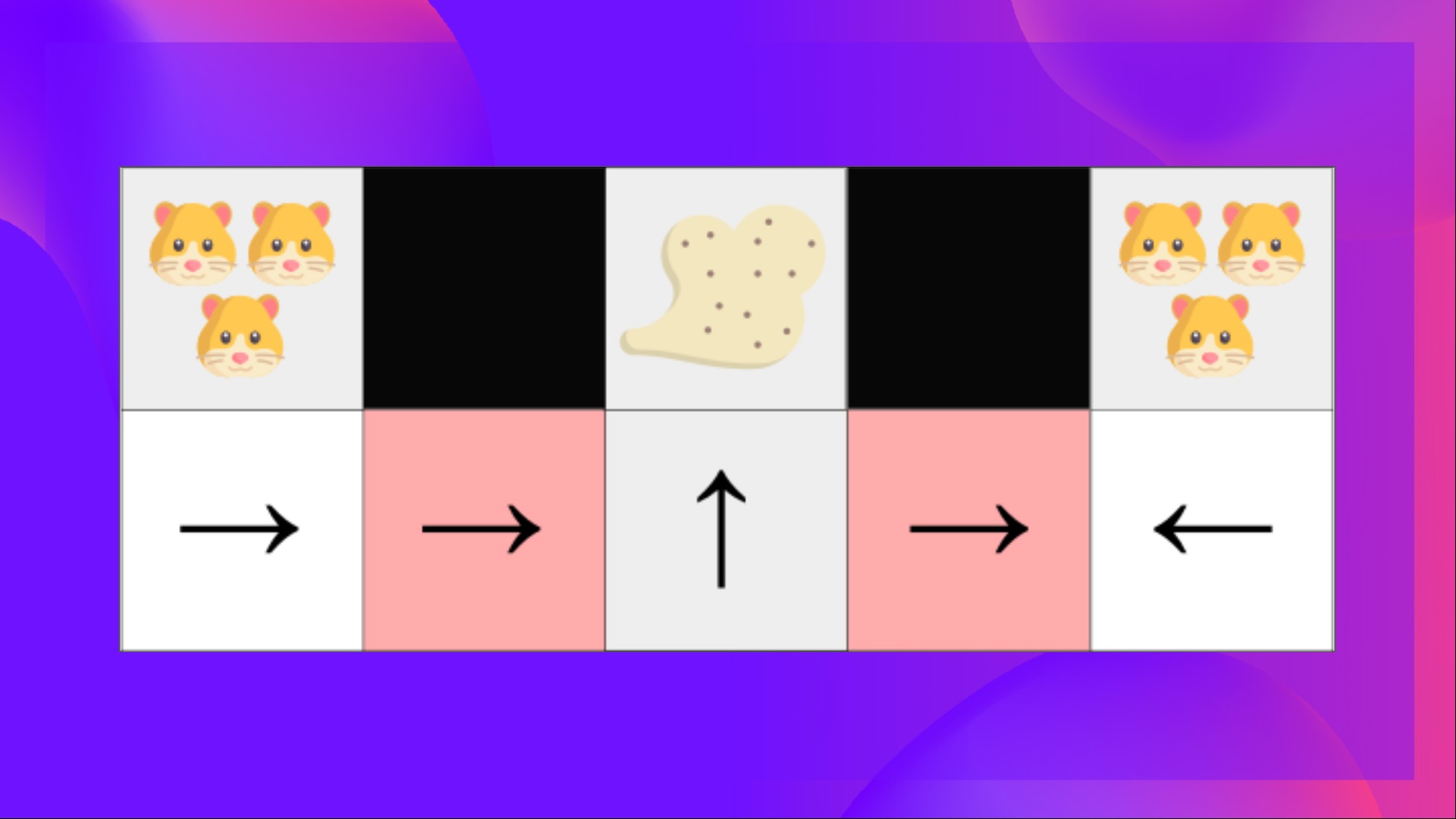
在确定性策略下,当处于红色状态时,策略要么向右移动,要么向左移动。这两种情况都会导致智能体陷入困境,无法清除灰尘。
在基于价值的强化学习算法下,我们学习了一种拟确定性策略(quasi-deterministic policy)("贪心 epsilon 策略")。因此,我们的智能体在找到灰尘之前可能需要花费很长时间。
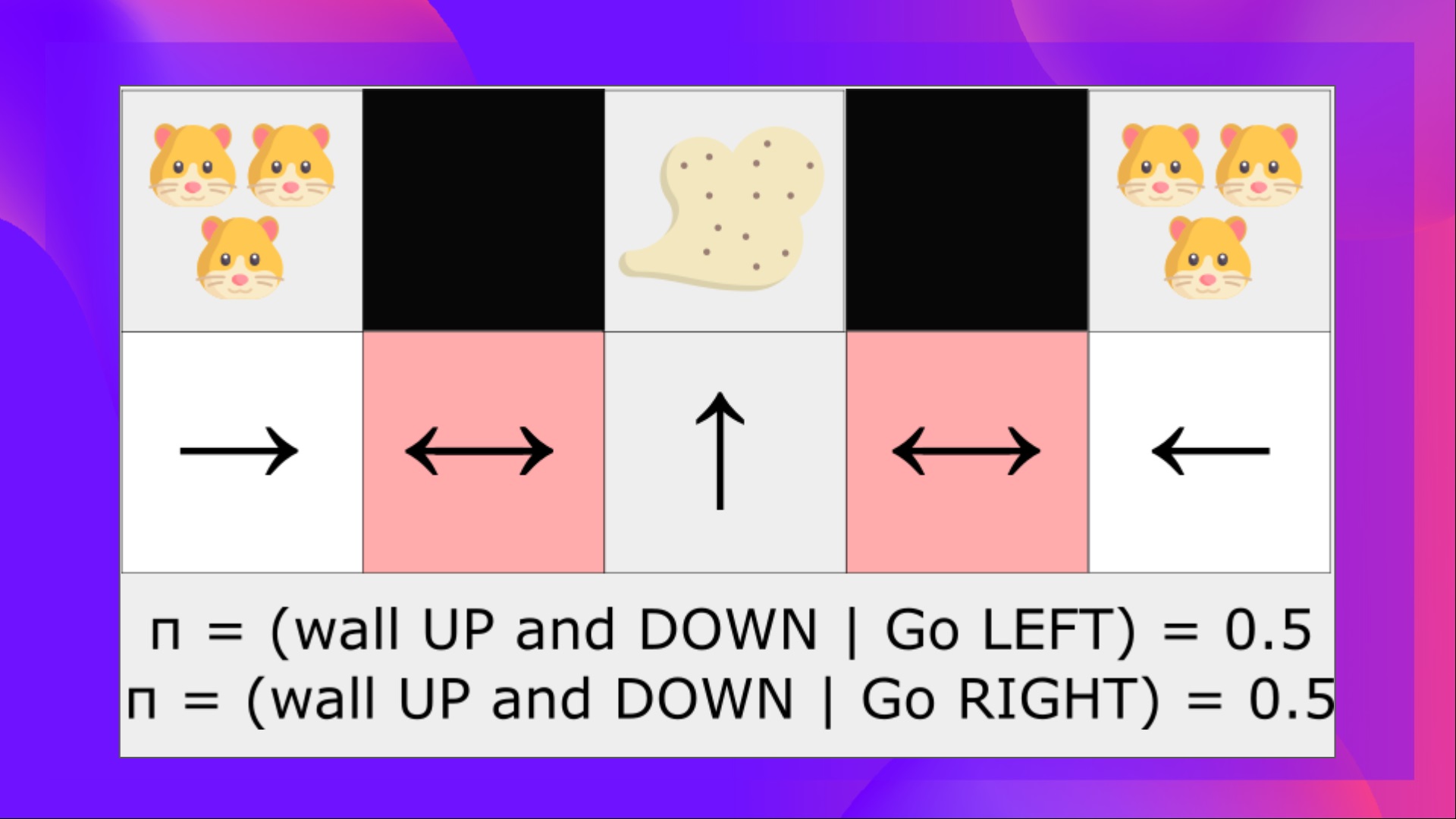
另一方面,最优随机策略将在位置状态下随机向左或向右移动。因此,它不会被困住,有很高的概率到达目标状态。
策略梯度方法在高维动作空间和连续动作空间中更有效
深度 Q 学习的问题在于,在给定当前状态的情况下,他们的预测会在每个时间步为每个可能的动作分配一个分数(最大预期未来奖励) 。
但是,如果我们有无限可能的动作呢?
例如,对于自动驾驶汽车,在每个状态下,你都可以(几乎)无限地选择动作(将方向盘转动 15°、17.2°、19.4°、鸣喇叭等)。我们需要为每个可能的动作输出一个 Q 值!而采取连续输出的最大动作本身就是一个优化问题!
相反,使用策略梯度方法,我们输出动作的概率分布。
策略梯度方法具有更好的收敛性
在基于价值的方法中,我们使用激进的操作来**改变价值函数:我们在 Q 估计上取最大值。**因此,如果动作估计值发生任意小的变化,导致具有最大值的动作不同,则动作概率可能会发生显著变化。
例如,如果在训练期间,最好的动作是向左移动(Q 值为 0.22),而在它之后的训练步骤是向右移动(因为右边的 Q 值变为 0.23),我们极大地改变了策略,因为现在策略将大部分时间都是向右移动而不是向左移动。
另一方面,在策略梯度方法中,随机策略行动偏好(采取行动的概率)随时间平稳变化。
缺点
当然,策略梯度方法也有一些缺点:
- 通常,策略梯度收敛于局部最大值而不是全局最优值。
- 策略梯度逐步变慢 :训练可能需要更长的时间(效率低下)。
- 策略梯度可以有很高的方差。我们将在演员-评论员单元中看到为什么以及如何解决这个问题。
👉 如果您想更深入地了解策略梯度方法的优缺点, 你可以查看此视频.